Deep Reinforcement Learning (DRL) for UAV Control in Gazebo Simulation Environment
2018-09-12
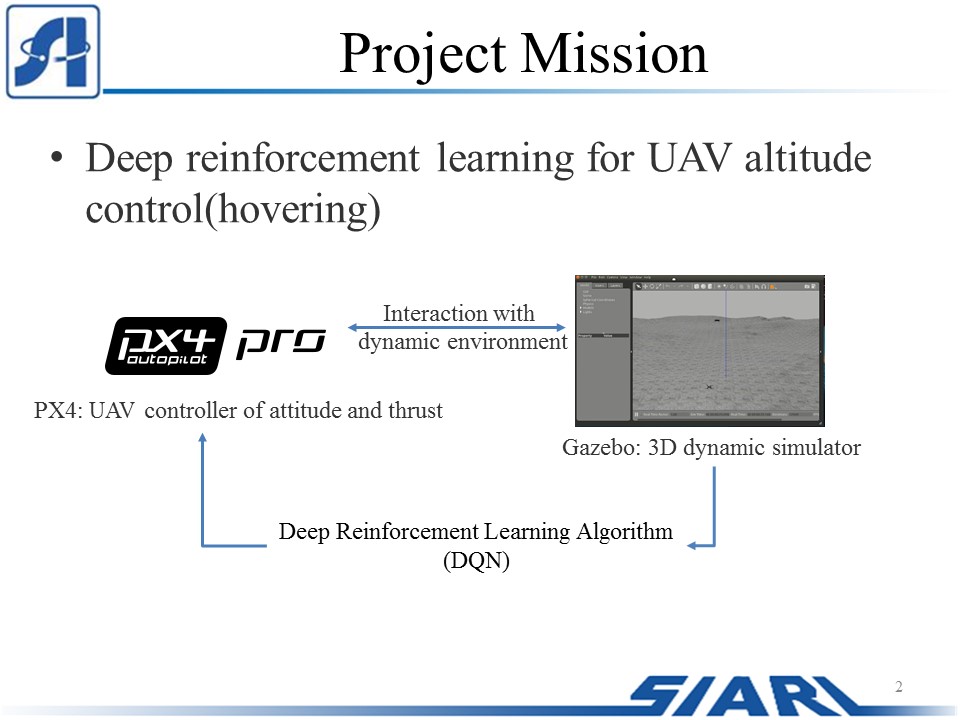
1 System Introduction
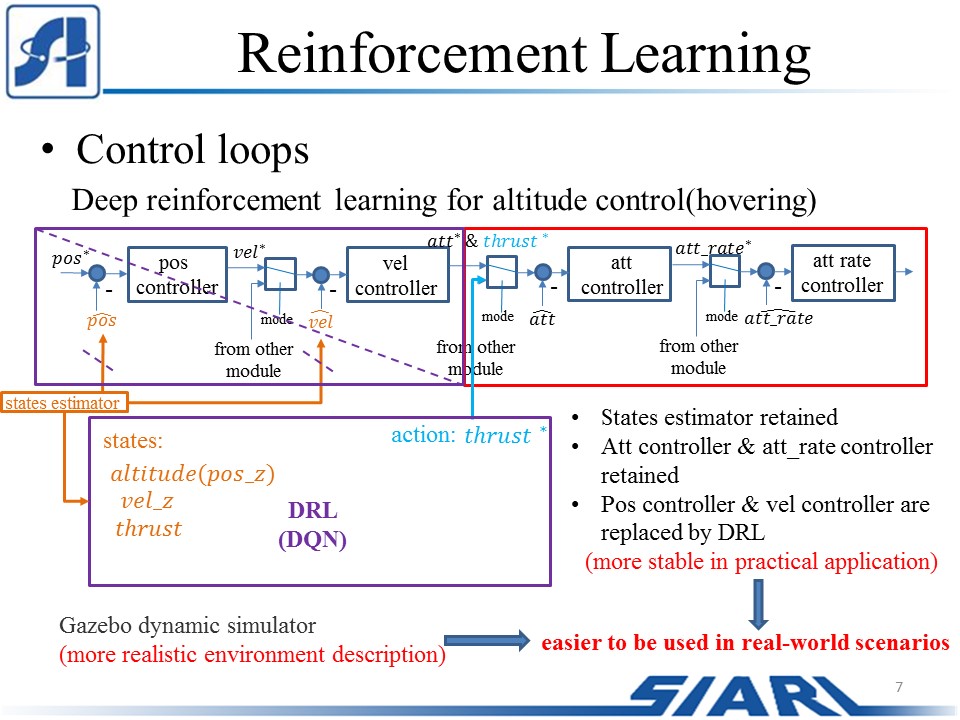
Deep Q-Network (DQN) is utilized for UAV altitude control(hovering) and Gazebo is used as the dynamic simulator to interact with the drone.
Github: PX4-Gazebo-Simulation

2 Our Intention
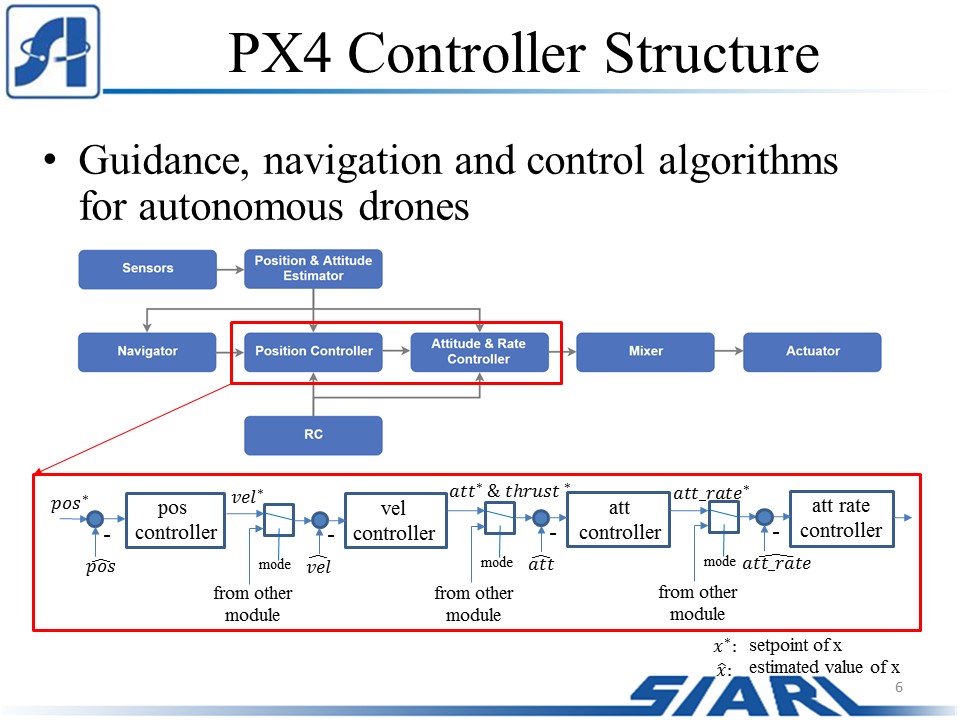
Proportional-integral-derivative (PID) controllers are used as low-lever controllers to achieve desired thrust and three desired Eular angles, and DQN is used for position control.
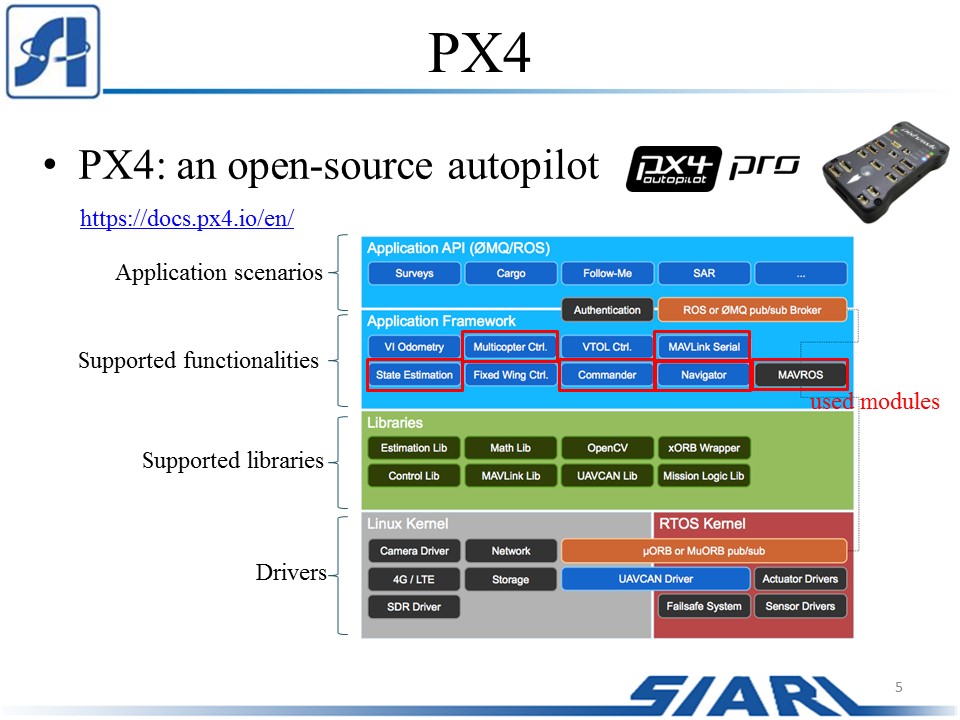
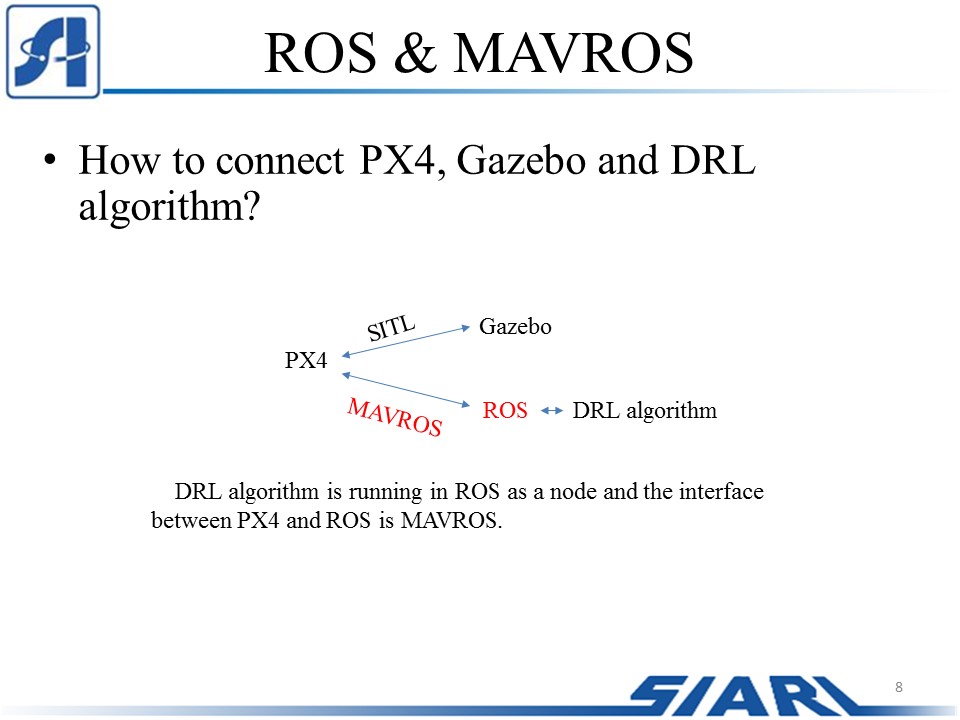
PX4 is an open-source autopilot and is widly used for drones.
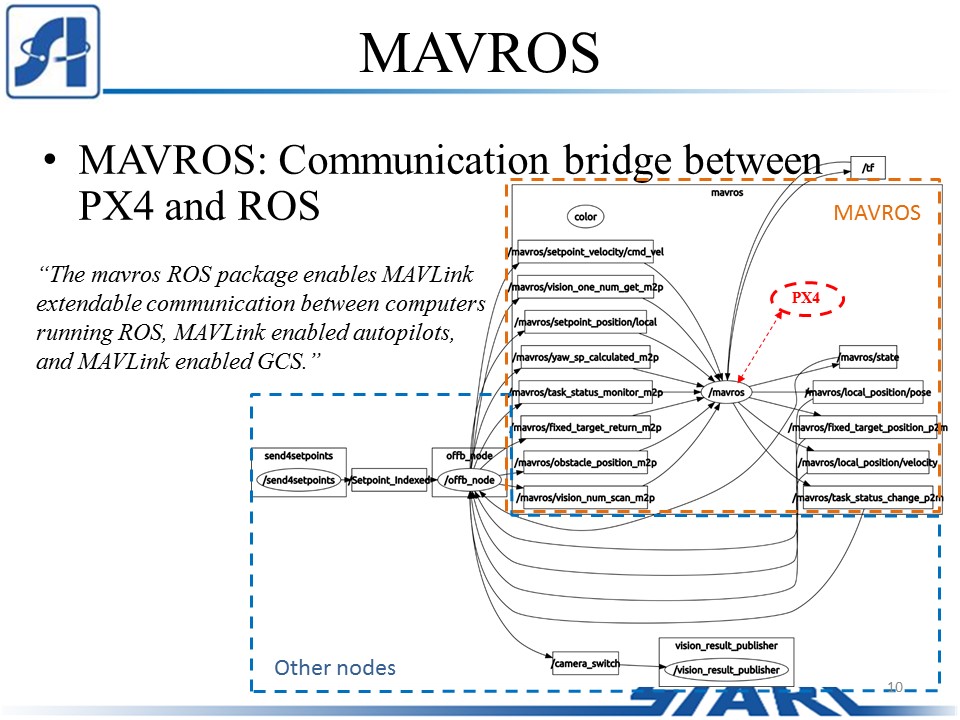
3 Other requirements: ROS and MAVROS

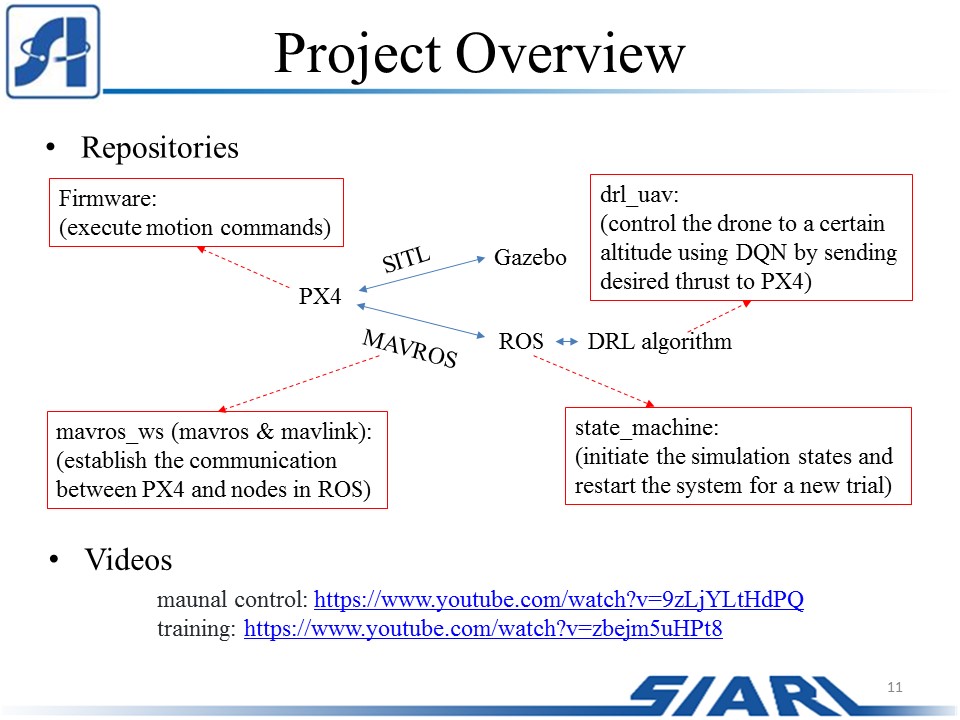
4 Project Overview
5 Constraints and Reward
