Powered Parafoil Unmanned Aerial Vehicle (PPUAV) Project
2017-12-15
1 System Introduction
Powered Parafoil Unmanned Aerial Vehicle (PPUAV) is a small aircraft, which is able to cover large horizontal distances from the release point. It provides a unique capability for air-transport of heave payloads according to the high payload-weight-ratio.
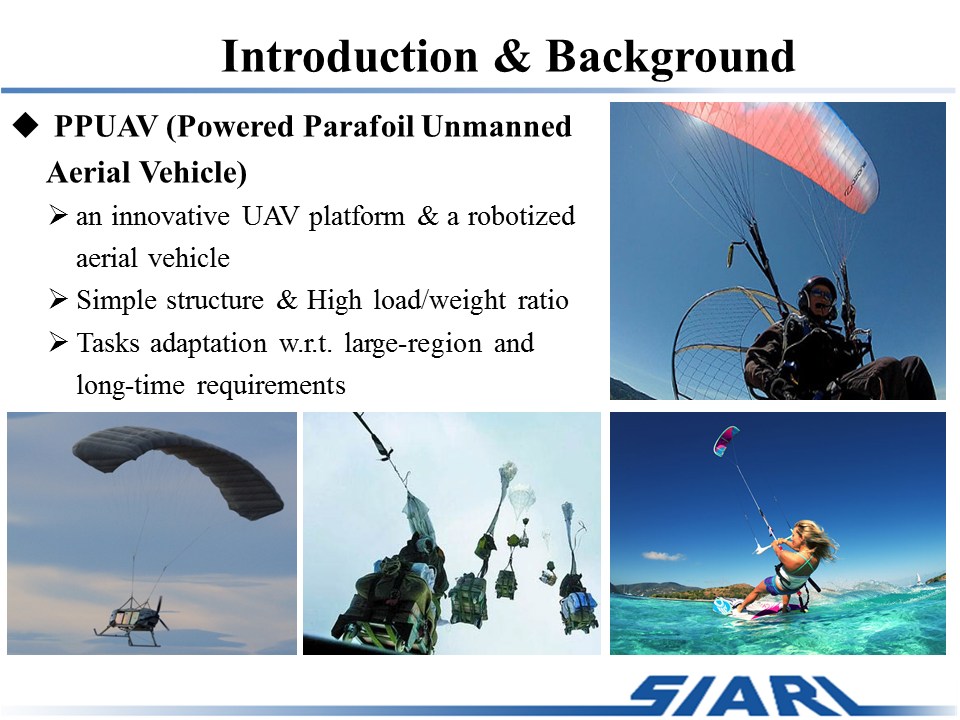
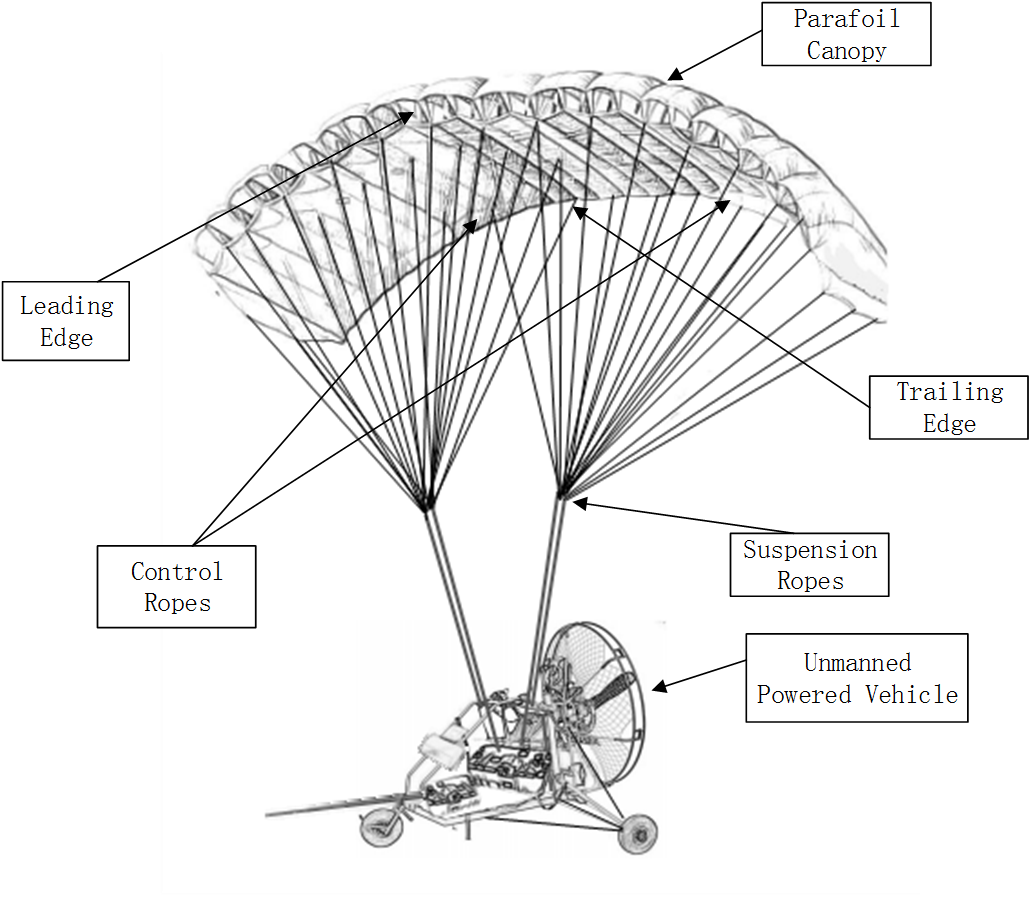
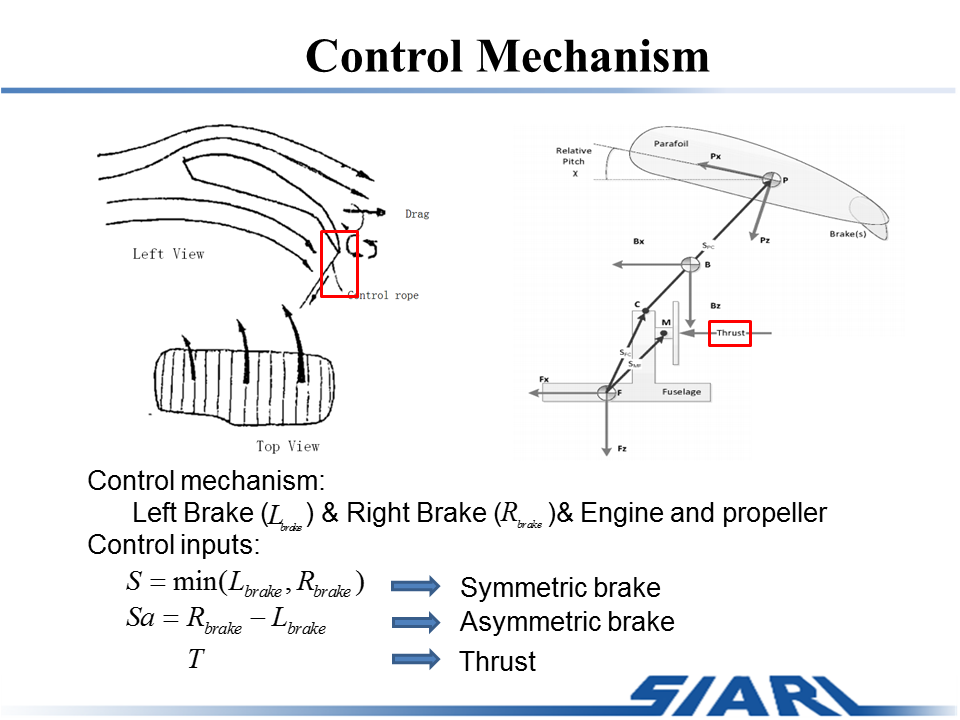
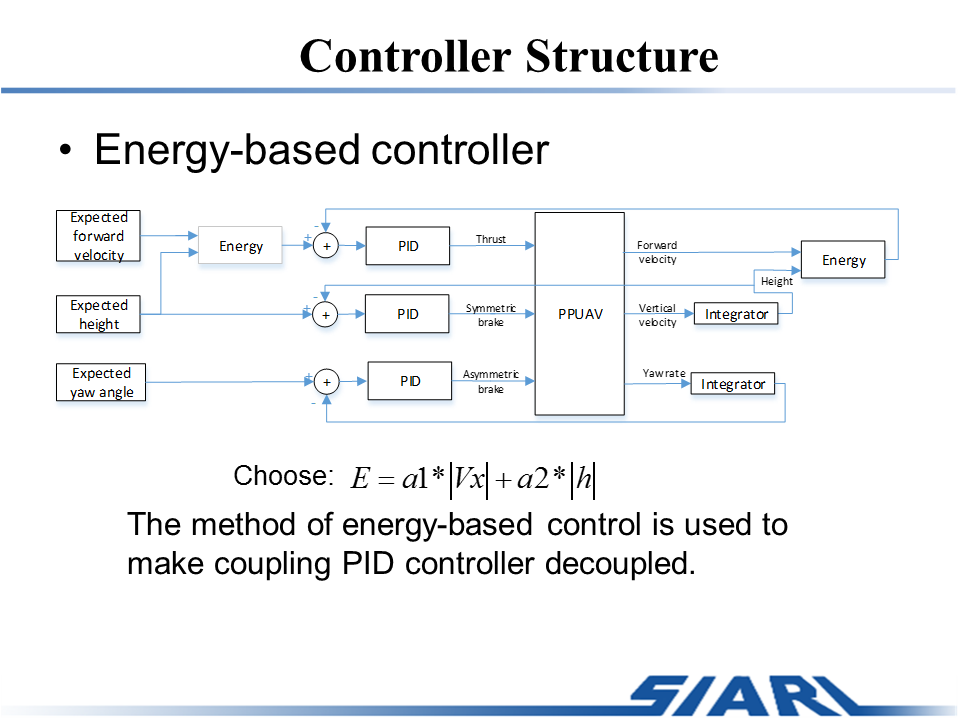
PPUAV consists of parafoil canopy, payload, suspension lines and GN&C system. For the parafoil, deployment of the right (or left) brake causes a significant drag rise and a small lift rise on the right (or left) side of the canopy. And the above effects cause PPUAV to turn right with slight roll movement when a right (or left) brake is deployed. With an engine installed on the back of the payload, PPUAV can adjust its forward and vertical velocities.

2 PX4 Firmware for PPUAV
Project link: https://github.com/SIA-PPG
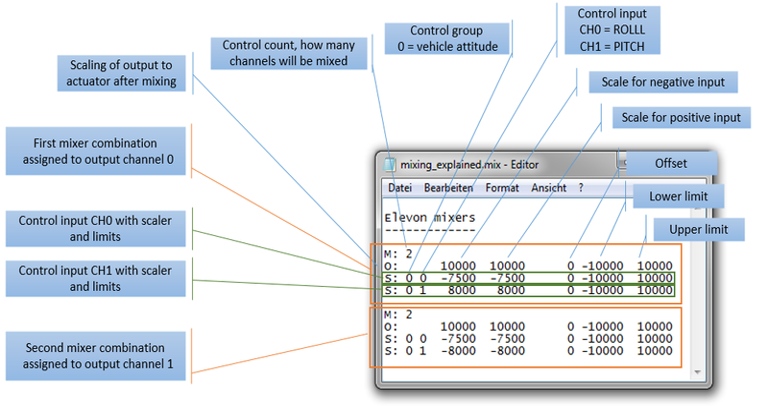
PPUAV is not supported officially by PX4, so customized Mixer for PPUAV is needed.
3 Controller: Energy-based Controller
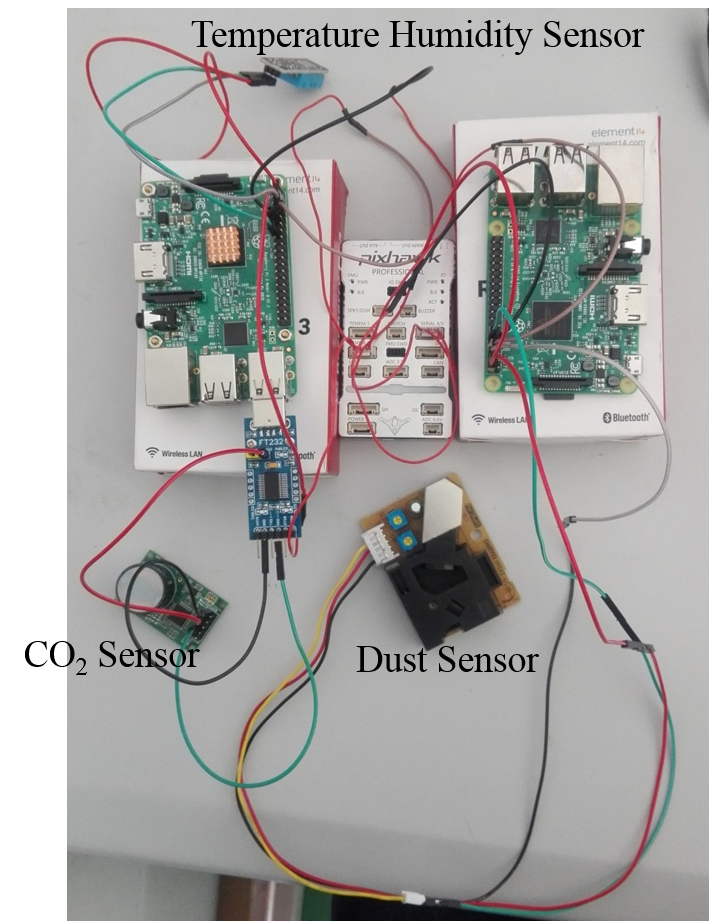
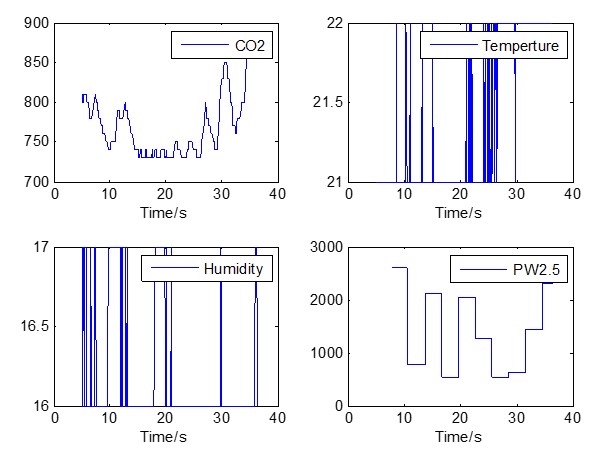
4 Additional Sensors for Environment Monitoring
5 Video
flight test: Youtube